Đâu là lý do mà xe tự hành trở nên đắt đỏ phần 2
Chia sẻ
Thứ Ba,
14/04/2020
Nguyễn Văn Hùng
Đâu là lý do mà xe tự hành trở nên đắt đỏ phần 2
Không chỉ đắt vì các cảm biến và máy tính họ mang theo rất đắt tiền. Mà còn:
Một chiếc xe tự hành cần một bản đồ tốt. Bản đồ kỹ thuật số truyền thống thường được tạo ra từ hình ảnh vệ tinh và có độ chính xác ở mức mét. Mặc dù điều đó quá đủ cho người lái xe, nhưng xe tự hành đòi hỏi độ chính xác cao hơn cho thông tin ở làn đường. Do đó, bản đồ độ nét cao đặc biệt là cần thiết.
Cũng giống như các bản đồ kỹ thuật số truyền thống, các bản đồ phân giải cao (HD) này chứa nhiều lớp thông tin. Lớp dưới cùng là một bản đồ với các ô lưới khoảng 5 x 5 cm; nó được tạo ra từ dữ liệu khai thác thô được thu thập bằng những chiếc xe đặc biệt. Lưới này ghi lại thông tin độ cao và phản xạ về các đối tượng trong môi trường.
Trên đầu lưới cơ sở đó, có một vài lớp thông tin bổ sung. Chẳng hạn, thông tin làn đường được thêm vào bản đồ lưới để cho phép các phương tiện tự trị xác định xem chúng có đi đúng làn hay không. Trên đầu trang của thông tin làn đường, các nhãn hiệu giao thông được thêm vào để thông báo cho các phương tiện tự trị về giới hạn tốc độ địa phương, cho dù họ đang tiếp cận đèn giao thông,… Điều này giúp ích trong trường hợp camera trên xe không thể đọc được biển báo.
Bản đồ kỹ thuật số truyền thống được cập nhật 6 đến 12 tháng một lần. Để đảm bảo các bản đồ mà xe tự hành sử dụng có chứa thông tin cập nhật, bản đồ HD nên được làm mới hàng tuần. Do đó, việc tạo và duy trì bản đồ HD có thể tốn hàng triệu đô la mỗi năm cho một thành phố hạng trung
Tất cả dữ liệu trên các bản đồ HD đó phải được lưu trữ trên xe trong bộ nhớ trạng thái rắn (SSD) để truy cập sẵn sàng, thêm vào chi phí cho phần cứng máy tính, cần phải khá mạnh. Ước tính sơ bộ, một hệ thống điện toán cơ bản cho xe tự hành sử dụng bộ xử lý Intel Xeon E5 và 4 - 8 GPU Nvidia K80. Hệ thống này có khả năng cung cấp 64,5 nghìn tỷ hoạt động tính toán mỗi giây, nhưng nó tiêu thụ khoảng 3.000 watt và tạo ra một lượng nhiệt khổng lồ. Và nó có giá khoảng 30.000 đô la

Khi mà chỉ những cảm biến và máy tính có thể dễ dàng tiêu tốn hơn 100.000 đô la, thật dễ để hiểu tại sao các phương tiện tự lại đắt như vậy, ít nhất là ngày nay. Chắc chắn, giá sẽ giảm khi tổng số lượng sản xuất tăng. Nhưng vẫn chưa rõ chi phí tạo và duy trì bản đồ HD sẽ được tính như thế nào. Trong mọi trường hợp, sẽ cần thời gian cho công nghệ tốt hơn để giải quyết tất cả các mối quan tâm an toàn rõ ràng đi kèm với lái xe tự hành trên đường thông thường và đường cao tốc.
Giải quyết thách thức từ PerceptIn
PerceptIn đã cố gắng giải quyết những thách thức này bằng cách tập trung vào các phương tiện nhỏ, tốc độ chậm hoạt động trong khu vực hạn chế như trong khuôn viên các trường đại học và khu công nghiệp với hệ thống đường di chuyển nội bộ hơn là các cao tốc giao thông cao tốc.
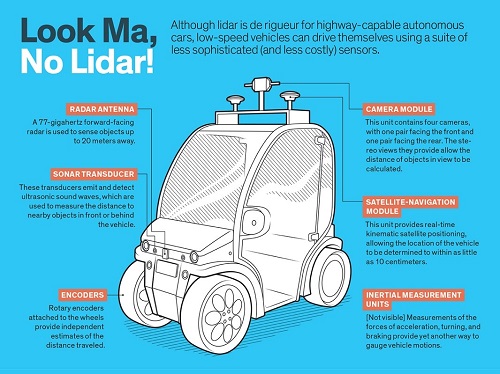
Chiến thuật chính mà công ty sử dụng để giảm chi phi là loại bỏ hoàn toàn hệ thống Lidar và sử dụng các cảm biến giá cả phải chăng hơn: máy ảnh, thiết bị đo quán tính, GPS, bộ mã hóa bánh xe, radar và sonar. Dữ liệu mà mỗi cảm biến này cung cấp sau đó có thể được kết hợp qua một quá trình gọi là phản ứng tổng hợp cảm biến.
Với sự cân bằng của những hạn chế và lợi thế, các cảm biến này có xu hướng bổ sung cho nhau. Khi một lỗi hoặc trục trặc, những cảm biến/thiết bị khác có thể đảm nhận để đảm bảo rằng hệ thống vẫn đáng tin cậy. Với phương pháp kết hợp cảm biến này, chi phí có thể giảm xuống cònkhoảng 2.000 USD.
Bởi vì xe chạy ở tốc độ thấp, nên chỉmất tối đa 7 mét để dừng lại, làm cho nó an toàn hơn nhiều so với một chiếc xe bình thường, có thể mất hàng chục mét để dừng lại. Và với tốc độ thấp, các hệ thống máy tính có yêu cầu độ trễ ít nghiêm trọng hơn so với những hệ thống được sử dụng trong xe tự hành tốc độ cao.
Xe PerceptIn sử dụng định vị vệ tinh để định vị ban đầu. Mặc dù không chính xác như các hệ thống được tìm thấy trên những chiếc xe tự hành có khả năng đi trên đường cao tốc, những máy thu điều hướng vệ tinh này vẫn cung cấp độ chính xác của máy bay. Sử dụng kết hợp hình ảnh và dữ liệu của máy ảnh từ các đơn vị đo lường quán tính (trong một kỹ thuật gọi là đo thị lực quán tính trực quan), máy tính xe cày cải thiện thêm độ chính xác, cố định vị trí xuống mức độ giảm dần.
Để chụp ảnh, PerceptIn đã tích hợp bốn camera vào một mô-đun phần cứng. Một cặp đối diện với phía trước của chiếc xe, và một cặp khác phải đối mặt với phía sau. Mỗi cặp camera cung cấp tầm nhìn hai mắt, cho phép nó chụp được loại thông tin không gian thông thường được cung cấp bởi flipar. Hơn nữa, bốn máy ảnh cùng nhau có thể chụp được góc nhìn 360 độ về môi trường, với đủ các vùng không gian chồng chéo giữa các khung để đảm bảo rằng phép đo thị giác hoạt động theo bất kỳ hướng nào.
Ngay cả khi đo thị giác không thành công và tín hiệu định vị vệ tinh bị rơi ra, tất cả sẽ không bị mất. Chiếc xe vẫn có thể thực hiện cập nhật vị trí bằng cách sử dụng bộ mã hóa quay gắn vào bánh xe của mình theo một chiến lược chung mà các thủy thủ sử dụng trong nhiều thế kỷ, được gọi là tính toán chết (dead reckoning).
Các bộ dữ liệu từ tất cả các cảm biến này được kết hợp để cung cấp cho chiếc xe sự hiểu biết tổng thể về môi trường của nó. Dựa trên sự hiểu biết này, máy tính xe cộ có thể đưa ra các quyết định cần thiết để đảm bảo chuyến đi suôn sẻ và an toàn.Chiếc xe cũng có một hệ thống chống va chạm hoạt động độc lập với máy tính chính của nó, cung cấp một tuyến phòng thủ cuối cùng. Điều này sử dụng sự kết hợp của radar sóng milimet và sonar để cảm nhận khi chiếc xe nằm trong phạm vi 5 mét của vật thể, trong trường hợp đó, nó ngay lập tức dừng lại.
Mặc dù có nhiều tiến bộ trong thập kỷ qua, nhưng có lẽ sẽ còn một thập kỷ nữa hoặc hơn trước khi những chiếc xe tự trị hoàn toàn bắt đầu đi đến hầu hết các con đường và đường cao tốc. Trong khi đó, một cách tiếp cận thực tế là sử dụng các phương tiện tự trị tốc độ thấp trong các thiết lập hạn chế. Một số công ty, bao gồm Navya, EasyMile và May Mobility, cùng với PerceptIn, đã theo đuổi chiến lược này một cách nghiêm túc và đang có những tiến bộ tốt.
Cuối cùng, khi công nghệ có liên quan tiến bộ, các loại phương tiện và triển khai có thể mở rộng, cuối cùng bao gồm các phương tiện có thể bằng hoặc vượt qua hiệu suất của một người lái xe chuyên nghiệp.
PerceptIn đã chỉ ra rằng họ có thể chế tạo những chiếc xe tự hành nhỏ, tốc độ thấp với chi phí thấp hơn nhiều so với chi phí để chế tạo một chiếc xe tự trị chạy trên đường cao tốc. Khi các phương tiện được sản xuất với số lượng lớn, chúng tôi hy vọng chi phí sản xuất sẽ dưới 10.000 đô la. Không quá xa trong tương lai, nó có thể là thiết bị tự hành sử dụng năng lượng sạch chuyên chở hành khách tại các trung tâm thành phố như trung tâm thương mại Manhattan, nơi tốc độ trung bình của giao thông hiện nay chỉ 7 dặm một giờ. Một hệ thống phương tiện như vậy sẽ giảm đáng kể chi phí, cải thiện điều kiện giao thông, tăng cường an toàn và cải thiện chất lượng không khí.
nguồn: http://automation.net.vn/
TIN LIÊN QUAN
31
T03
Modbus Gateway là gì? Bộ chuyển đổi giao thức Modbus RTU/ASCII sang Modbus TCP
Việc chuyển đổi công nghệ, thay thế cách thức giao tiếp, truyền dữ liệu giữa hệ thống với hệ thống hay giữa hệ thống với các thiết bị hiện trường...

29
T03
Màn hình cảm ứng công nghiệp là gì? Tổng quan về màn hình LCD công nghiệp
Màn hình cảm ứng đã trở nên rất phổ biến trong cuộc sống hàng ngày của chúng ta, từ điện thoại di động, máy ATM, ki-ốt, quầy bán vé may bay...
29
T03
Switch PoE công nghiệp là gì? Tiêu chí lựa chọn Switch PoE cho ứng dụng công nghiệp
Switch PoE công nghiệp là gì? Switch PoE công nghiệp (Power over Ethernet) là thiết bị mạng chuyên dụng được thiết kế để hoạt động trong môi trường khắc nghiệt. Không chỉ...
11
T03
Truyền thông MQTT Broker và kiến trúc ứng dụng thực tế trong IoT
Truyền thông MQTT Broker và kiến trúc ứng dụng thực tế trong IoT MQTT Broker Communication Server: BRK Series System Architecture MQTT (Message Queuing Telemetry Transport) is a communication architecture developed by IBM for the...
04
T03
Bộ lập trình nhúng Windows PACs AXP-9000-IoT
Bộ lập trình nhúng Windows PACs AXP-9000-IoT AXP-9000-IoT Introduction The AXP-9000-IoT is Windows 10 IoT- based PACs that combine computing, I/O, and operator interface into a single unit and provide the perfect...
04
T03
Bộ lập trình điều khiển nhúng (EdgeAI controller) AI Box AIB-2000
Bộ lập trình điều khiển nhúng (EdgeAI controller) AI Box AIB-2000 Introduction The EdgeAI controller is a fanless, secure, compact, low-power edge AI computing device powered by an ARM-based CortexR-A72 processor. Equipped...